リーガルテック株式会社は、同社が提供する特許支援AIプラットフォーム「MyTokkyo.Ai」が、ヒューマノイドロボットの学習効率化技術に関する特許検討において活用されたことを発表しました。このAIは、人間の動きを学ぶヒューマノイドの学習時間を短くするための制御技術の特許検討をサポートし、その過程で学習データ処理の非効率という課題の解決に貢献しました。

ヒューマノイドロボットの学習が抱える課題
ヒューマノイドロボットは、人のような体の構造を持つロボットで、製造現場やサービス、研究など、さまざまな場所での活躍が期待されています。これらのロボットが人間の動きを正確に再現するためには、「模倣学習」という技術が非常に重要です。
しかし、多くの関節を持ち、複雑な動きができるヒューマノイドの場合、学習させるための「モーションデータ」(動きのデータ)が非常に膨大になります。このため、データの処理や学習に大変な時間がかかってしまうという問題がありました。
あるロボット開発企業では、この学習時間を短くしつつ、ロボットの動きをより正確にするための新しい学習アルゴリズムを研究していました。しかし、その技術のアイデアをどのように「発明」としてまとめ、すでに存在する模倣学習技術と何が違うのかを明確にするかが、特許を考える上での課題となっていたのです。
AIが特許検討を効率化する「MyTokkyo.Ai」
このような状況の中、開発段階のアイデアを効率的に特許検討へ進める手段として、特許の実務に特化したAIエージェント「MyTokkyo.Ai」が採用されました。
MyTokkyo.Aiは、アルゴリズムのアイデアや学習の流れをまとめた技術資料を入力すると、AIがその内容を分析し、特許の出願に必要な「課題」「解決手段」「技術的効果」といった要素に自動で整理できます。また、ロボットの制御や機械学習の分野で先行する技術を参考にしながら検討を進められるため、発明のポイントや新しさを短時間で整理できる点が評価されました。

活用状況と得られた効果
MyTokkyo.Aiの活用により、今回の事例では以下のような発明要素が体系的に整理されました。
-
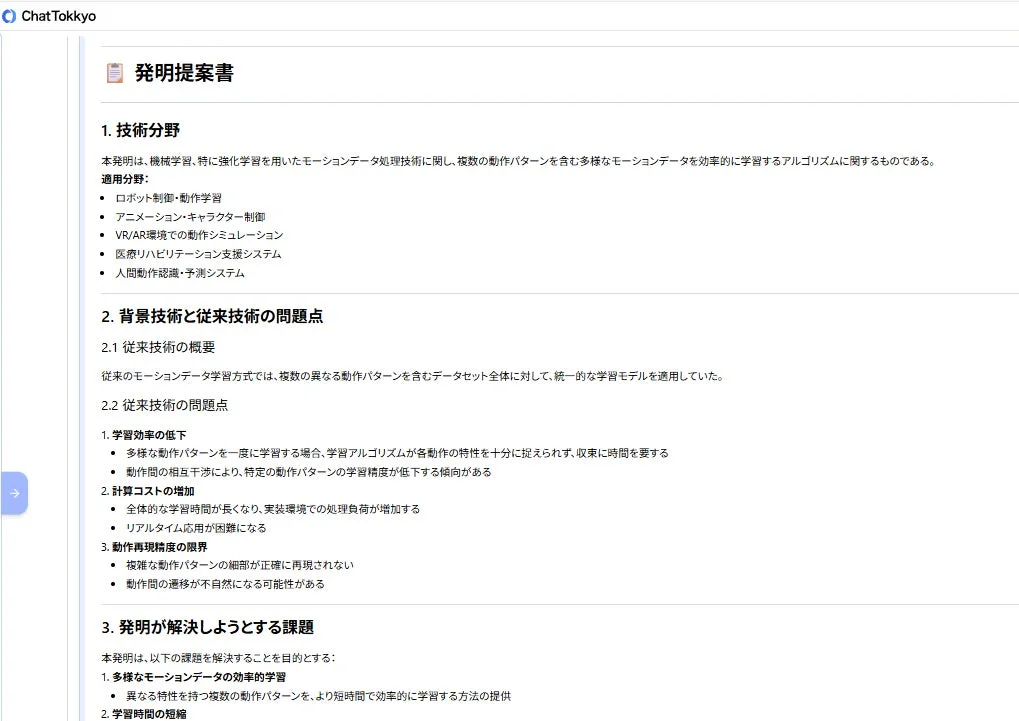
課題: 多くの種類のモーションデータを一度に学習する従来の方法では、学習の効率が下がり、ヒューマノイドの訓練に長い時間がかかるという点。
-
解決手段: 人間の動きを小さな要素に分けて、それぞれの動きの単位で局所的に強化学習を行う「分割学習方式」を導入することで、学習プロセス全体を効率化するアルゴリズム。
-
技術的効果: 学習時間を約40%短縮することに加え、動きごとの最適化により、ヒューマノイドの動作再現精度を高める効果。
これらの内容が発明提案書として整理されたことで、研究開発のアイデアを特許出願を見据えた具体的な技術表現へと落とし込むことが可能となり、特許検討にかかる手間を減らすことにつながりました。
今後の展望
ヒューマノイドの分野では、動きが高度になるにつれて、学習の効率やデータ処理の方法が競争力を決める重要な要素となっています。MyTokkyo.Aiを活用することで、このような最先端の学習アルゴリズムに関するアイデアについても、発明の要素を分かりやすくし、特許検討を効率的に進めることができるでしょう。
リーガルテック株式会社はこれからも、ロボットやAI分野をはじめとする最先端技術の領域において、企業の研究開発を知的財産(特許など)の面から支援する特許AIエージェントとして、新しい発明の創出と知的財産戦略の高度化に貢献していくとしています。
会社概要
-
会社名:リーガルテック株式会社
-
設立:2021年3月
-
資本金:3億7,900万円(資本準備金含む)
-
代表取締役社長:平井 智之
-
所在地:東京都港区虎ノ門5-13-1 虎ノ門40MTビル4F
-
事業概要:特許調査・発明抽出プラットフォーム「MyTokkyo.Ai」、自社専用AIプラットフォーム「AI IPGenius」、共同開発支援プラットフォーム「リーガルテックVDR」の開発・提供

