
協働ロボットのリーディングカンパニーであるユニバーサルロボット(UR)と、AIモデルの学習を支援するScale AIは、2026年3月16日に米カリフォルニア州サンノゼで開催されたGTC 2026にて、新たなAIトレーニングシステム「UR AI Trainer」を発表しました。このシステムは、これまでのロボットのように事前にプログラムされた動きをするだけでなく、AIを使って人の動きを学習し、実行する新しいタイプのロボットを実現します。
「UR AI Trainer」とは?
「UR AI Trainer」は、人の動きをロボットが真似して覚える(模倣学習)ためのトレーニングシステムです。ロボットが実際に作業する環境で、カメラの映像(視覚情報)、ロボットの動き(動作情報)、そしてどのくらいの力で触れたか(力覚情報)といった、様々な種類の高品質なデータを集めます。これらのデータを使って、AIの土台となる大きなモデル(基盤モデル)を、実際の工場で使えるように訓練します。
URのAIロボティクス製品担当バイスプレジデントであるAnders Beck氏は、「お客様は、ロボットが導入される環境で、高精度なデータを使ってAIモデルを学習させる方法を求めています。UR AI Trainerは、研究室でのテストから工場での実際の運用までを直接つなぐ、業界初のソリューションです」と述べています。
高品質なデータ取得の重要性
AIロボットがうまく学習するためには、質の高いデータが欠かせません。これまでの多くの学習データは、研究用のロボットで集められていたため、実際の生産現場には合わないことがありました。また、カメラの映像だけでは、繊細な作業や物を触る作業をロボットが正確に再現するのは難しいという課題がありました。
「UR AI Trainer」は、UR独自の「ダイレクトトルク制御」という技術と、ロボットが対象物に触れる力を感じ取る「力覚フィードバック」の技術を活用しています。これにより、ロボットが物理的にどのように物と相互作用するかを細かく制御できるため、これまで難しかった繊細な作業のデータも高品質で集めることができます。
URのダイレクトトルク制御については、以下のリンクで詳しく紹介されています。
ダイレクトトルク制御
Scale AIとの連携でデータ活用を加速
「UR AI Trainer」では、作業者が「リーダー」と呼ばれるロボットを直接操作すると、もう一台の「フォロワー」ロボットがその動きをリアルタイムで真似するという「リーダー・フォロワー構成」を採用しています。この時、動作、力、画像といった複数の種類のデータが同時に記録され、画像を見て、言葉を理解し、行動するAIモデル(Vision-Language-Actionモデル)の学習に必要なデータが作られます。
このシステムは、URのAI専用プラットフォーム「UR AI Accelerator」上で動き、Scale AIのソフトウェアと連携しています。これにより、工場で稼働するロボットから常に大量のデータを集め、AIモデルをより早く改善していく仕組みが作られます。
Scale AIのPhysical AI部門ゼネラルマネージャーであるBen Levin氏は、「ユニバーサルロボットは産業用ロボットの分野でリーダーであり、その世界的な導入実績はデータ収集とAIの活用にとって理想的な基盤です。この協力により、AIモデルの学習、導入、改善を素早く行える統合的なデータ基盤が実現しました」とコメントしています。
両社はまた、URロボットで集めた大規模な産業用データセットを年内に公開する予定です。
GTCでの実機体験と未来への展望
GTC会場のURブースでは、来場者が「UR AI Trainer」を実際に体験できました。UR3eロボットを操作する「リーダー」として使い、触った感覚のフィードバックを受けながら、UR7eロボットを「フォロワー」として動かすことで、スマートフォンのパッケージング作業を模倣学習する様子を体験しました。集められたデータはScale AIのプラットフォームにリアルタイムで記録され、すぐにAI Trainer上で再生することもできます。

さらに、AIモデルのトレーニングデータを作成する過程は、仮想空間でも紹介されました。NVIDIAの「Omniverse」や「Isaac Sim」というシミュレーション環境で、Haply Inverse3というデバイスを使ってUR3eロボットシステムを操作し、現実と同じような動きを再現するシミュレーションを体験できました。
URはNVIDIAの「Physical AI Data Factory Blueprint」の活用も検討しており、AIが学習するためのデータを自動で大量に作り出すことを目指しています。これにより、計算資源をロボットの学習データを作るための基盤に変えていく計画です。
NVIDIAのロボティクスおよびエッジAIエコシステム責任者であるAmit Goel氏は、「現実世界で実際に動き、作業を行うAI(Physical AI)への移行には、決まった動きをするプログラム型自動化から、人のように認識し、判断し、学習できるロボットへの転換が不可欠です。ユニバーサルロボットはNVIDIA Isaacのシミュレーション基盤を活用し、高精度なデータを取得し、生成できる拡張性の高い基盤を構築しています」と述べています。
Generalist AIによる実環境での性能実証
データ取得のデモンストレーションに加え、URのパートナーであるGeneralist AIによるロボット基盤モデルの実演も行われました。2台のUR7eロボットがスマートフォンのパッケージング作業を自律的に実行し、器用さや協力して動く能力、物を触る操作能力を実際の環境で示しました。
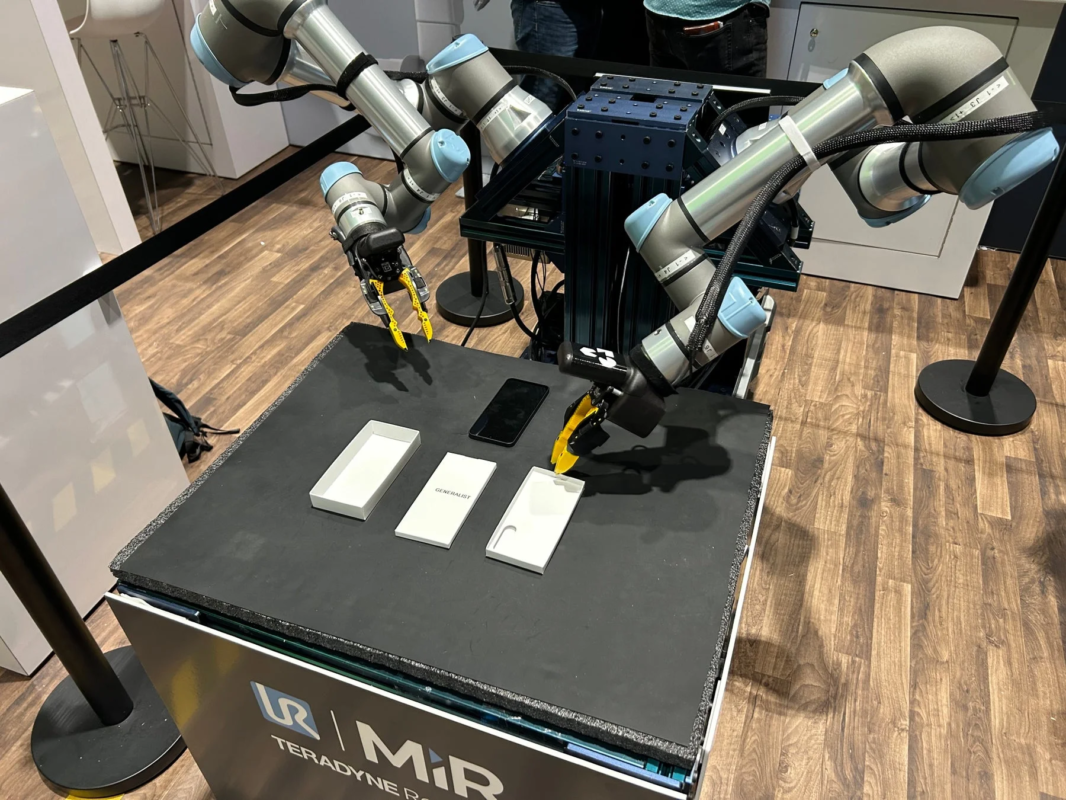
このデモンストレーションは、大量で質の高いトレーニングデータと最先端のAIモデルを組み合わせることで、研究室だけでなく実際の環境でも動くPhysical AIが実現できることを示しています。
Generalist AIの共同創業者兼CEOであるPete Florence氏は、「ユニバーサルロボットの信頼性の高い産業用プラットフォーム上での今回のデモは、物理世界における常識的な判断を、実際の作業能力へと変換できることを示しています。これにより、様々な産業での展開が可能になります」と述べています。
URのAnders Beck氏は、「AIモデルの学習やデータ取得の先進的な企業に当社の技術が採用されていることは、ユニバーサルロボットがPhysical AI分野における重要なプラットフォームとして選ばれていることを示しています」と付け加えました。
「UR AI Trainer」の発表は、産業用ロボットがAIを活用してさらに進化し、工場での自動化を次の段階へと進める重要な一歩と言えるでしょう。今後、より多くの現場でAIロボットが活躍する未来が期待されます。
詳細については、以下のリンクをご覧ください。
UR AI Trainer
ユニバーサルロボット
Generalist AI
UR AI Accelerator
NVIDIA Omniverse
NVIDIA Isaac Sim
Haply Inverse3
NVIDIA Physical AI Data Factory Blueprint
Scale AI

