
AGRISTとMicrosoftがスマート農業の未来を拓く
AIとロボットを活用したスマート農業に取り組むAGRIST株式会社は、Microsoftの「AI Co-Innovation Lab KOBE」で、自動収穫ロボットの性能をさらに高めるための新しい技術「フィジカルAI」の開発検証を実施しました。この技術は、AIの判断をロボットの実際の動きに結びつけることで、より効率的で賢い収穫を目指すものです。

フィジカルAIとは?
フィジカルAIとは、AIが周りの状況を理解し、その結果をロボットの具体的な動きに直接つなげる仕組みのことです。今回の検証では、自動収穫ロボットが作物を収穫する際に、例えば「ヘタが葉に隠れている」「周りに邪魔なものがある」といった状況で、どのようにロボットアームを動かせばいいかをAIが判断し、最適な「回り込み角度」を教えてくれるようにしました。
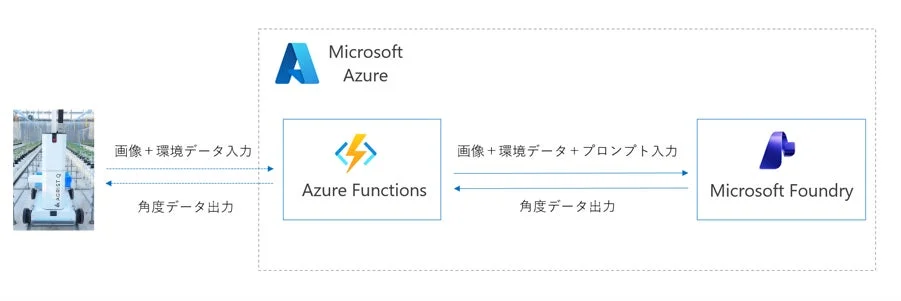
この「回り込み角度」は、Azure FunctionsというMicrosoftのクラウドサービスを通じて、ロボットが使える形(API)で提供されます。これにより、AIが考えた最適な動きをロボットが素早く実行できるようになるのです。
開発検証の背景:ロボット収穫の課題
これまでAGRISTは、自動収穫ロボットを農作業の現場で役立てるために、AIによる作物の認識や予測の精度を高める努力を続けてきました。しかし、実際の畑では、作物の位置や角度だけでなく、葉や茎、支柱などがロボットアームの動きを妨げることがあり、収穫に失敗したり時間がかかったりすることがありました。

これらの現場で起こるさまざまな問題は、あらかじめ決まったルールだけで全てに対応するのが難しいものです。そこで、AIの推論結果をロボットが実際に動ける指示に変換し、刻々と変わる環境にも柔軟に対応できる「フィジカルAI」が注目されました。
今回の取り組み:5日間の短期集中開発
今回の検証は5日間の短期集中で行われました。主な目的は、自動収穫ロボットがAzure Functionsを呼び出し、AIが算出した推奨角度(回り込み角度)をJSON形式で受け取り、その情報をもとにロボットが動けることを確認することでした。
具体的な内容は以下の通りです。
-
生成AIの推論システム構築: Microsoft Foundry(Foundry Models)というプラットフォーム上で、生成AIが最適な角度を推論するためのシステムを作りました。
-
データの前処理: ロボットが撮影した画像(色情報や奥行き情報など)を、AIが推論しやすい形に整えました。
-
出力形式の固定: AIが出力する角度データを、ロボットが簡単に扱えるJSON形式に決めました。
-
Azure Functionsの構築: 「ヘタが隠れている」「障害物がある」といった2つの状況を想定し、ロボットからの呼び出しに応答するAzure Functionsを開発しました。
-
動作連携の確認: 実際に自動収穫ロボットがAzure Functionsを起動し、返ってきた角度データをもとに動くところまで確認しました。
主な成果と今後の可能性
この検証により、生成AIが算出した角度データがAzure Functionsを通じてロボットの動きにスムーズにつながる一連の流れが確認できました。AIが推論する時間は約10〜30秒程度で、この技術が収穫の成功率を大きく高める可能性が見えてきました。特に、入力データ(画像やその前処理)の工夫が、AIの精度向上にとても重要であるという手応えも得られました。
これらの成果は、フィジカルAIを農業の現場で実用化するための大きな一歩と言えるでしょう。
関係者からのコメント
AGRISTの清水秀樹CTOは、今回の検証で「生成AIの推論結果をロボットが動ける指示として返すところまで確認できたことは、フィジカルAIを現場に実装する上での大きな前進だ」と語りました。また、画像から状況を理解し、具体的な行動指示に落とし込める手応えを得られたことで、今後1〜2年で実用レベルに近づけられる可能性を強く感じているとのことです。
ロボット開発責任者の増渕武氏は、フィジカルAIの急速な発展に触れ、「実運用へ向けて技術を検証することは非常に重要だ」と述べました。短期間での動作確認まで到達できたことに感謝し、今後の機能拡張や精度向上に大きな可能性を感じているそうです。
Microsoft AI Co-Innovation Labの束田氏からは、「野菜の生育状況の多様性が収穫率向上の大きな課題である中、フィジカルAIの取り組みには大きな可能性を感じている」とのコメントがありました。今後のデータ蓄積と評価設計により、さらなる発展に期待が寄せられています。

今後の展望
AGRISTは今回の検証結果をもとに、今後、実環境での精度や使いやすさをさらに高めるための取り組みを進めていきます。具体的には、Azure環境の整備、ログや画像を中心としたデータ基盤の設計・実装、ロボットの収穫成果とAIの精度の評価方法の設計、そして実際のデータを使ったAIの精度向上などが挙げられます。
これらの段階的な取り組みを通じて、自動収穫ロボットの収穫成功率を高め、作業時間を短縮するフィジカルAIの社会実装を目指します。AGRISTは今後もMicrosoftとの協力を強化し、AIと自動収穫ロボットを組み合わせたスマート農業を推進していく方針です。
AGRIST株式会社について
AGRIST株式会社は、AIとロボットを活用したスマート農業を提供し、持続可能な農業の実現を目指すスタートアップ企業です。宮崎県新富町に本社を構え、AI農業プラットフォーム「AGRIST Ai」の構築やロボット開発を行うエンジニア、次世代農場の研究開発を行う農場スタッフの採用を積極的に行っています。

-
AGRISTの媒体資料:https://agrist.com/media
-
AGRISTの採用サイト:https://agrist.com/recruit

