bestatが3Dデータ生成技術を大幅改善!製造・インフラ現場のデジタル化を加速する新アルゴリズムとは
3Dデータ処理に特化したbestat株式会社は、同社が提供する3Dデータ活用クラウドサービス「3D.Core」において、一部のアルゴリズムを新しくしました。この新しい技術は、製造業やインフラの現場で、より安定して正確な3Dデータを作成できるようにすることを目的としています。

現場が抱えていた3Dデータ作成の課題
近年、工場設備や社会インフラの状況を正確に把握したり、デジタル空間に再現したりするために、3Dデータを活用したいというニーズが高まっています。レーザースキャナーやドローン、スマートフォンを使って3Dデータを作る方法が広まっていますが、写真や動画から3Dデータを作る際には、いくつかの困りごとがありました。
例えば、似たような場所を間違ってつなげてしまい、3Dモデル全体が壊れてしまうことや、写真を撮ったはずなのに、なぜか3Dデータの中にその部分が含まれない「欠損」が生じることがありました。特に、人工物が多い製造業やインフラの現場では、このような問題が頻繁に起こっていたのです。
新しいアルゴリズム「SLAM方式のSfM」とは
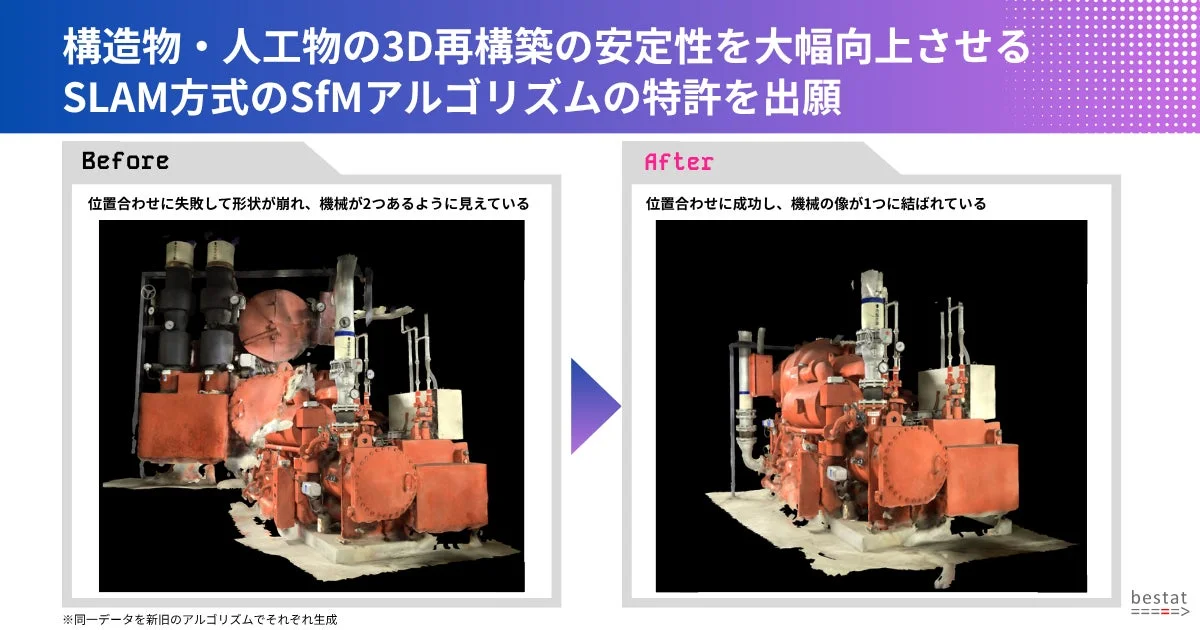
bestatが今回導入したのは、「SLAM(スラム)方式のSfM(エスエフエム)アルゴリズム」という新しい技術です。これは、iPhoneのARKitという機能が持っている、モノの位置を特定する情報(VI-SLAM)を使いながら、その情報が少しずつずれていく「累積誤差」を、bestat独自の「相対ポーズ推定」という技術で修正するものです。
これまでの方法では、「致命的な位置合わせの失敗」といって、3Dデータ全体が大きく崩れてしまったり、「撮ったはずの場所が3Dデータにない」といった問題が起こりがちでした。しかし、この新しいアルゴリズムを使うことで、これらの問題が大幅に減り、製造業やインフラの現場で、人工物の3Dデータをより安定して、信頼性の高い形で生成できるようになります。このアルゴリズムはすでに特許を出願しているとのことです。
新アルゴリズムで実現されること
この新しい技術の導入により、主に以下の2つの点が大きく改善されます。
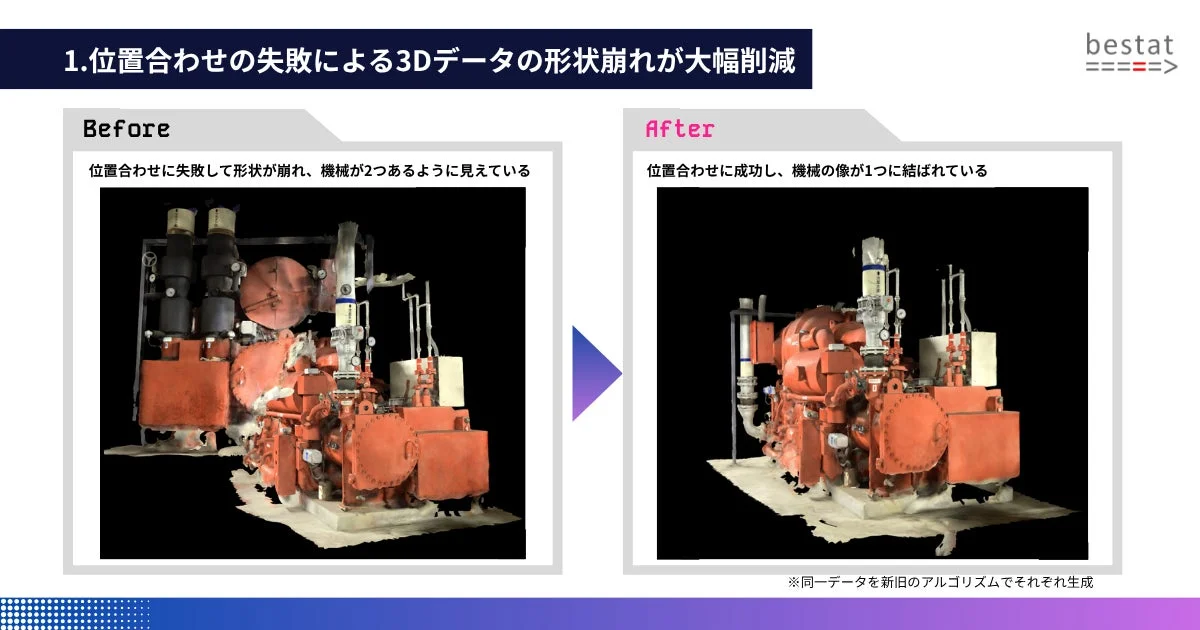
1. 致命的な位置合わせの失敗を大幅に削減
3Dデータを作る際、複数の写真や動画を正確に組み合わせる「位置合わせ」が非常に重要です。従来のアルゴリズムでは、似たような形状の部分を誤って同一箇所と判断し、本来は一つであるはずの機械が二重に見えたり、全体の形状が崩れてしまったりすることがありました。新しいアルゴリズムでは、この位置合わせの失敗が大幅に減り、3Dデータ全体が崩壊するケースが少なくなります。
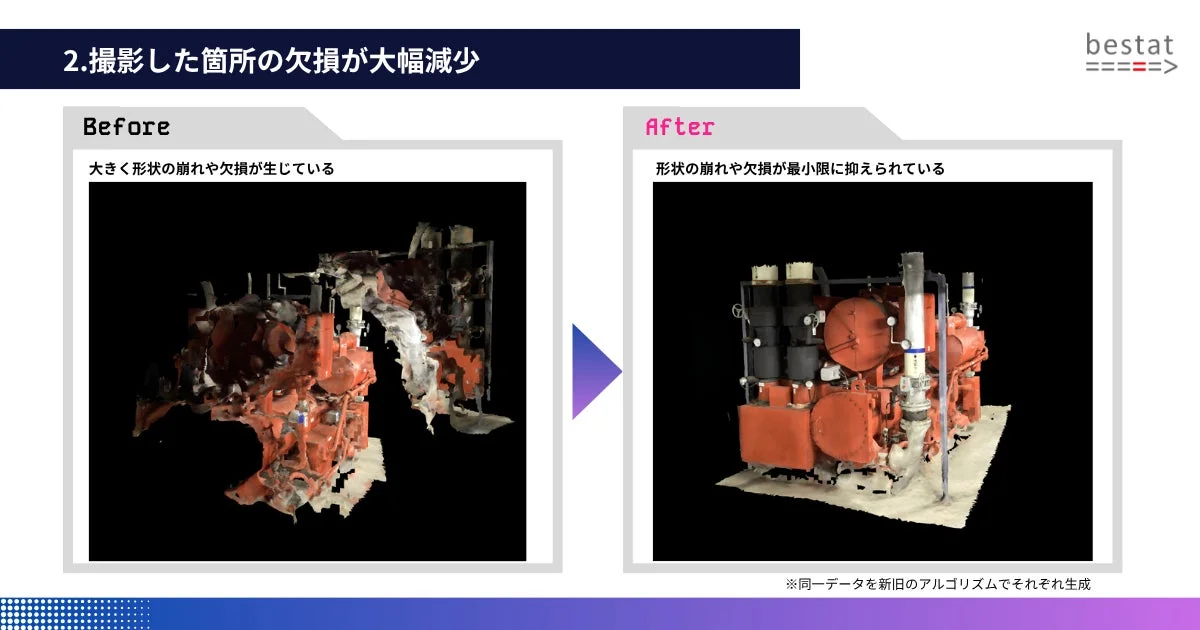
2. 撮影した箇所の欠損を大幅に削減
「写真を撮ったはずなのに、出来上がった3Dデータにはその部分がない」という欠損も、従来の課題でした。新アルゴリズムでは、この欠損が大幅に減り、撮影された場所が3Dデータにきちんと反映されるようになります。
これらの改善により、特に特徴点の少ない人工物や、広い範囲をスキャンする場合、あるいは撮影順序がバラバラなデータでも、安定して高品質な3Dデータが作れるようになります。ただし、非常に手ブレが激しい場合や、ほとんど特徴点がないような難しい条件下では、完全にきれいなモデルを作るのが難しいケースもまだあるとのことです。
今後の展開
bestat株式会社は、「リアルとデジタルが繋がる時代をつくる」という目標を掲げ、アルゴリズムの研究から製品への導入までを一貫して自社で行う体制を整えています。これからも3Dデータ処理技術やAI技術を進化させ、製品に反映していくことで、製造業やインフラの現場で誰もが簡単に3Dデータを扱えるような基盤を提供し続けていく方針です。

bestat株式会社について
-
会社名: bestat株式会社
-
代表者: 代表取締役 松田 尚子
-
設立: 2018年
-
所在地: 〒113-0033 東京都文京区本郷6丁目25−14
-
事業内容:
-
3Dデータの取得・生成・活用クラウドサービス『3D.Core』シリーズの提供
-
3Dデータ処理API提供
-
デジタルツイン構築
-
3Dデータ活用にまつわる業務のAIエージェント開発
-
-
URL:

